 设计对话框如图2所示。
设计对话框如图2所示。
图1 船舶电力系统总体框图
图2 同步发电机模型及其属性设计对话框
1.2 励磁系统模型
本文采用相复励无刷交流励磁系统,模型由Simulink组件中的连续系统模块集进行建模[3⁃4],模型框图如图3所示。其中:Uref为自动电压调节器参考电压;Ud和Uq分别为发电机d轴和q轴的电压值;Ustab为接地零电压;iabc为定子三相电流;Uf是励磁电压。Ud和Uq产生相复励的电压信号,iabc三相电流信号产生相复励的电流信号,这两部分信号合成后,一部分送入调节器回路进行闭环调节,另一部分输出到励磁机。
图3 励磁系统模型框图
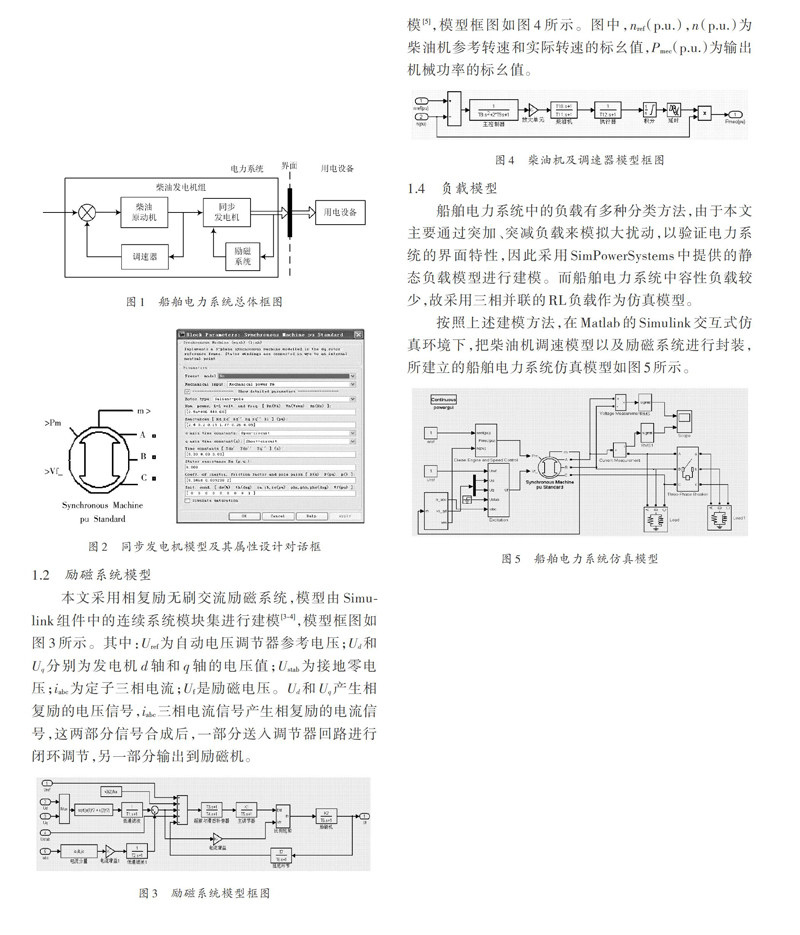
1.3 柴油机及调速器模型
在柴油发电机组中,柴油机的主要作用是提供原动力,柴油机自身没有自动调速能力,因此必须装设调速器。本文柴油机与调速器组合采用二阶环节进行建模[5],模型框图如图4所示。图中,ef(p.u.),n(p.u.)为柴油机参考转速和实际转速的标幺值,Pmec(p.u.)为输出机械功率的标幺值。
图4 柴油机及调速器模型框图
1.4 负载模型
船舶电力系统中的负载有多种分类方法,由于本文主要通过突加、突减负载来模拟大扰动,以验证电力系统的界面特性,因此采用SimPowerSystems中提供的静态负载模型进行建模。而船舶电力系统中容性负载较少,故采用三相并联的RL负载作为仿真模型。
按照上述建模方法,在Matlab的Simulink交互式仿真环境下,把柴油机调速模型以及励磁系统进行封装,所建立的船舶电力系统仿真模型如图5所示。
图5 船舶电力系统仿真模型
2 船舶电力系统仿真
在上述船舶电力系统仿真模型中,同步发电机容量为2 500 kV·A、额定电压为440 V,额定频率为60 Hz。电力系统带功率因数为0.8,67.5%额定功率负载运行,在1 s和2 s时通过突加、突减不同功率大小的负载来得到电力系统的瞬态压降。
同步发电机组带载启动后,第1 s突加负载L1(cos φ=0.8,50%PN),第2 s突减负载L1,第3 s结束运行。系统突加、突减负载过程中电力系统的线电压波形如图6所示。为了便于分析船舶电力系统的瞬态压降,得电力系统线电压的有效值变化如图7所示,由图7可知,系统带67.5%PN负载启动,经过0.8 s后电压达到稳定值,启动过程结束;在1 s时,系统突加50%PN负载,电压瞬变,经过0.029 s达到最小值377.8 V,再经0.175 s达到最大值450.2 V,在1.18 s系统重新稳定;在2 s时,系统突减50%PN负载,电压再次瞬变,经过0.04 s达到最大值516.5 V,再经0.427 s达到最小值431.93 V,在2.316 s系统重新稳定。
图6 突加、突减50%PN负载时电力系统线电压波形
图7 突加、突减50%PN负载时电力系统线电压有效值波形
为了分析船舶电力系统电压瞬变,分别突加、突减50%PN,75%PN,100%PN,功率因数分别为0.8,0.6,0.4的负载,通过Matlab仿真,得到各种工况下的电压瞬变值,如表1、表2所示。
表1 突加负载时的电压瞬变值
表2 突减负载时的电压瞬变值
由表1数据可知,突加负载时,随着负载的增加,电压瞬变的最小值随之降低,而从稳态到达最小值的时间基本相同,从最小值升到最大值的时间逐渐增加,最大值却随之减小,整个瞬变过程的恢复时间逐渐增加。由表2数据可知,突减负载时,随着负载的增加,电压瞬变的最大值随之增加,而从稳态到达最大值的时间基本相同,从最大值降到最小值的时间逐渐增加,最小值也随之增大,整个瞬变过程的恢复时间逐渐增加。
综合表1和表2可知, 440 V、I型60 Hz船舶电力系统电压瞬变符合“MLT⁃STD⁃1399 300章”中的规定:在I型电力系统中,用电设备的突然启动可能导致电压在0.001~0.06 s内降至瞬变电压的最低值。而后,电压可能以每秒20%~75%标称电压的速度增至最高值,电压将在2 s内恢复到用电设备电压容差包络线内[6](418~462 V)。用电设备从电力系统的突然切断可能导致电压在0.001~0.03 s内增至瞬变电压的最高值。而后,电压可能以每秒20%~75%标称电压的速度降至最低值,电压将在2 s内恢复到用电设备的电压容差包络线内(418~462 V)。
3 结 语
本文利用Matlab/Simulink对船舶电力系统中各个主要组成部分进行了建模,并对I型电力系统模型在不同工况下进行了仿真,用具体生动的图形、确凿的数据得出了仿真结果,观察了电力系统电压参数的变化情况,定性地分析了电力系统的界面特性,为船舶电力系统的研究提供了参考。
参考文献
[1] 王浩亮.船舶电力系统稳定性研究[D].大连:大连海事大学, 2010:36.
[2] 于群,曹娜.Matlab/Simulink电力系统建模与仿真[M].北京:机械工业出版社,2011:53⁃59.
[3] 林飞,杜欣.电力电子应用技术的Matlab仿真[M].北京:中国电力出版社,2009:32⁃38.
[4] TABATABAEI I, FAIZ J, LESANI H, et al. Modeling and simulation of a salient⁃pole synchronous generator with dynamic eccentricity using modified winding function theory [J]. IEEE Transaction on Magnetic, 2004, 40(3): 1550⁃1555.
[5] 陈次祥,刘莉飞,唐石青,等.船舶综合电力系统仿真研究[J].上海造船,2010(1):51⁃55.
[6] United States Department of Defense. MLT⁃STD⁃139⁃300A Interface standard for shipboard systems: electrical power, alternating current [S]. US: Department of Defense, 1992.
[7] 包艳,施伟锋.船舶电力推进系统运行的仿真[J].中国航海,2011(4):34⁃38.







