打开文本图片集
摘 要:针对台风、暴雨、大雾和道路结冰等恶劣天气对道路行车安全的严重影响,基于现有物联网感知技术,结合蜂窝网络或专用短程通讯网络技术,开发一种毫米波雷达加红外摄像技术组成的泛在感知安全行车系统,对车辆行驶状况、突发自然灾害和潜在的动态安全隐患等进行精确感知和预警,主动、及时、快速、有效地将路况状况和潜在的行车安全隐患提供给驾驶人员,使驾驶人员及时对周围环境的变化做出快速判断并采取相应有效的应急预案和措施,提高车辆行驶的安全性,减少道路交通事故的发生。该系统具有较大技术经济效益和广阔的市场应用前景。
关键词:恶劣天气;泛在感知;安全行车系统;雷达;红外摄像
1 概述
1.1 研究背景
近年来,随着我国经济的快速发展,汽车消费越来越多地走进了普通家庭的生活,车辆和驾驶人员的数量也随之快速增长,道路交通压力大大增加,道路交通安全形势复杂,交通事故有愈演愈烈的趋势。根据世界卫生组织统计,全球每年车祸在全球夺去近125万人的生命,道路交通伤害已经成为15-29岁年龄组人群的首要死亡原因。我国《道路交通运输安全发展报告(2017)》显示,当前我国道路交通事故死亡人数居世界第一,道路交通安全形势十分严峻,对于发生交通事故的原因,除了疲劳驾驶、违法行车和超速行驶等原因外,其中台风、暴雨、大雾和道路结冰等恶劣天气也会导致严重的交通事故,其比例约占交通事故比例的30%。台风、暴雨、大雾和道路结冰等恶劣天气对行车安全的影响主要表现在以下几方面:
(1)路面积水湿滑、结冰会直接导致路面行驶状况变差,路面抗滑性能快速下降,摩擦系数降低,使行驶的车辆发生水滑和侧滑,严重影响道路行车的安全;
(2)暴雨、大雾等天气会导致道路能见度降低,驾驶人行车视距受到影响,对标志、标线及其它交通安全设施辨别不清,前后车辆的最短安全间距无法保证,驾驶人的观察和判断能力受到严重影响,导致发现安全隐患时由于制动距离不足而发生交通事故;
(3)由于恶劣天气下道路能见度降低,恶劣天气导致的突发自然灾害如路面沉陷、路面坑洞和障碍物,或潜在的动态安全隐患如横穿道路的行人、横向路口突然出现的车辆和行人等,驾驶人员往往无法及时提前准确地识别、判断和采取相应的应急措施。尽管驾驶人员已减速慢行,但因视线不清、视距不足,加上路面行駛状况较差,多重影响因素叠加导致驾驶人员发现潜在的安全隐患时措手不及,极易引发连锁追尾、多车相撞、群死群伤的重特大交通事故。
传统的路况预报或地图导航重点关注路面拥堵的情况。对于路面湿滑、积水结冰、局部能见度差等直接影响行车安全的路面条件,传统的路网技术方案主要有两种,一种是通过视频监控的手段、通过图像识别技术实时监测道路积水结冰等不良路况状况,另一种是通过天气预报对不利条件进行汇总,进而通过手机短信、通告或显示屏提示和提醒的方式,直接机械式地映射为对路面的预报,提醒驾驶人注意行车安全。传统被动的实时监控的缺陷是显而易见的,一方面在时间上预警信息其实已经滞后,另一方面监控无能力保证覆盖足够的路网密度,最为关键的问题是对突发的自然灾害和潜在的动态安全隐患位置无法及时、准确地提前进行预警和提醒。
针对恶劣天气下,现有路况预报和道路交通安全预警技术和措施的不足,本文研究并提出一种基于泛在感知的安全行车系统,也就是利用现有的物联网感知技术应对恶劣天气下行车安全的技术和产品方案,使驾驶人员主动及时感知和发现潜在的安全隐患,及时对周围环境的变化做出快速判断并采取相应有效的应急预案和措施,提高车辆行驶的安全性,减少道路交通事故的发生。
1.2 研究意义
恶劣天气条件对道路行驶条件的影响,如路面行驶状况变差、能见度降低而无法辨识标志标线及其它交通安全设施等客观条件,一般无法在较短时间内改善路面状况。传统的实时监控和预警提示时间滞后,并且无法对突发的自然灾害和潜在的动态安全隐患位置无法及时、准确地提前进行预警和提醒。
本文所研究的泛在感知的安全行车系统是基于现有物联网感知技术,结合蜂窝网络或专用短程通讯网络进行路况预警。在可视条件恶劣、视频监控难以发挥有效作用,不能及时规避道路行车安全风险的情况下,利用毫米波雷达和红外技术为整个道路交通系统提供可靠而稳定的信息,主动、及时、快速、有效地将路况状况和潜在的行车安全隐患提供给驾驶人员,达到提前预知,及时规避潜在的风险,把道路行车危险降到最低,具有较大的技术经济效益和社会效益。
本系统作为未来自动驾驶技术的探索和应用,通过后续的技术创新和发展,也可适用于未来常规小汽车、自动驾驶汽车等多种模式混行下的地面交通环境。
2 基于泛在感知的安全行车系统设计与应用
基于泛在感知的安全行车系统的开发是针对道路行车可视条件恶劣、视频监控难以发挥有效作用的情况下,克服传统被动的实时监控和预警提示时间滞后等特点,主动、及时、快速、有效地对突发的自然灾害和潜在的动态安全隐患位置及时、准确地提前进行预警和提醒。
2.1 系统构建目标与拟解决的关键问题
传统的天气预报预警只能提供较大范围的预警,无法及时获取并精确定位影响道路行车安全的隐患和路面行驶信息,即使是目前前沿技术领域—无人驾驶技术上使用的摄像头,也因为其光学性能,受环境影响较大而无法做出准确判断。因此,本文研究通过在路面结构层内部铺设传感器,通过传感器识别的信息进行快速处理,实时高效、精确地将安全隐患数据通过无线传输到行驶的车辆,驾驶人员通过终端设备显示精确的行车安全隐患位置和影响范围,主动感知和发现潜在的安全隐患,及时、快速判断并采取相应有效的应急预案和措施。经查阅相关文献并通过相关技术的对比与分析,本文采用毫米波雷达加红外传感器组成的泛在感知安全行车系统对影响行车安全的隐患进行精确感知和预警。
由于一般无法在较短时间内改善既有路面技术指标,所以本系统构建的目标和解决的主要问题是针对恶劣天气下道路能见度降低,恶劣天气导致的突发自然灾害如路面沉陷、路面坑洞和障碍物,或潜在的动态安全隐患如横穿道路的行人、横向路口突然出现的车辆和行人等,包括突发的自然灾害和潜在的动态安全隐患位置无法及时、准确地提前进行预警和提醒。
本文所提出的泛在感知安全行车系统依赖于现有的硬件设备实现感知人工智能,与自动驾驶技术中常用的摄像头或激光雷达相比,红外技术复合雷达的技术拥有更广的使用范围,它具有突破视觉死角和跨越遮挡物的信息获取能力,同时可以和其他车辆及设施共享实时驾驶状态信息。
2.2 系统原理与分析
2.2.1 雷达应用原理与分析
雷达具有高精度、高分辨率的优势,同时具备建立周边3D模型的前景。现有的雷达类型有激光雷达、超声波雷达、红外雷达和毫米波雷达等。激光雷达具有探测距离远,探测精确的特点,但是容易受到雨雾,特别是下雪和粉尘的干扰,在恶劣天气下适应性不是很好,另外设备、安装和维护的费用相对较大。超声波和红外雷达,具有价格低,设计简单的优点,但是同样对温度变化比较敏感,在南方和北方不同温度下探测精度会有很大的差别,同时探测的距离也有限。毫米波远距离雷达(LRR)探测的介质是电磁波,具有探测距离远、穿透能力强、环境适应性强以及实时性好等优点,且价格相对于昂贵的激光雷达而言,有更好的价格优势。但毫米波雷达的缺点也非常明显,无法感知行人,并且对周边障碍物无法进行精准的探测和感知。经对比分析,本系统雷达装置拟采用77GHz毫米波雷达探测器和一种驾驶员视觉辅助装置组合形成的系统,对于毫米波雷达探测器的缺点,可采取其它技术措施进行辅助和组合,本研究设想通过增加红外摄像技术组成新的系统,该部分内容将在下一节进行分析。
77GHz毫米波雷达探测器和一种驾驶员视觉辅助装置组合形成的系统具体工作方案如下:
77GHz毫米波雷达探测器:测量驾驶车辆与前方其它车辆之同的相对距离、相对速度、相对角度等驾驶环境数据信息,驾驶车辆的行驶速度通过速度传感器进行测量。
驾驶员视觉辅助装置:显示驾驶环境数据信息,即通过在仪表盘上安装小型液晶显示器,采用实例图像的方式在液晶显示器中实时显示前方车辆所在的位置、标注前方其他车辆危险等级。在低能见度情况下.以颜色辅助驾驶员区分前方车辆危险等级,并通过横向纵向预警机制,为驾驶员提供碰撞预警。
主要装置包括:77GHz毫米波雷达探测器、速度传感器、处理器和显示装置。
2.2.2 红外应用原理与分析
对毫米波雷达的应用原理与感知分析结果表明,雷达的主要缺点是无法感知行人,并且对周边障碍物无法进行精准的探测和感知。所以,系统采用77GHz毫米波雷达探测器测量驾驶车辆与前方其它车辆之同的相对距离,相对速度、相对角度等驾驶环境数据信息,辅助以红外摄像技术对行人和周边障碍物进行精准感知。
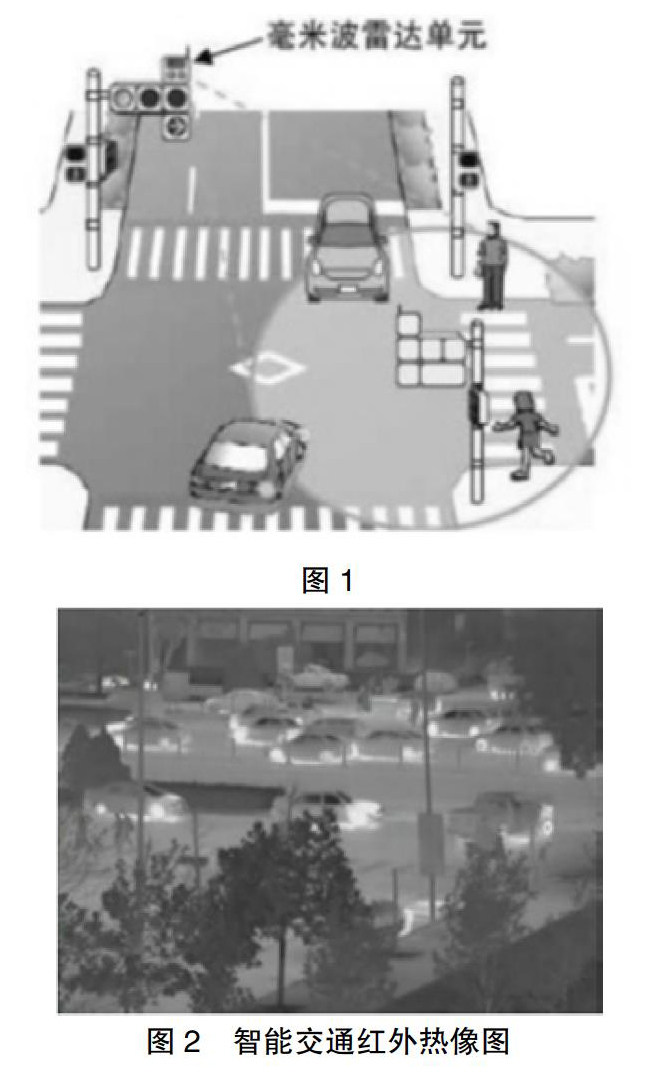
红外摄像技术分为被动式和主动式。被动红外摄像技术是利用任何物质在绝对零度以上都有红外线辐射,物体的温度越高,辐射出的红外线越多。利用该原理制成的摄像机最典型的就是红外热像仪,但这种特殊的红外摄像机造价昂贵,仅限于军事或特殊场合使用。主动红外摄像技术是采用红外灯辐射“照明”,应用普通低照度黑白摄像机、彩色转黑白摄像机或红外线低照度彩色摄像机,感受周围景物和環境反射回来的红外光实现夜视监控。主动红外摄像技术成熟、稳定,目前成为夜视监控的主流技术。红外测距传感器根据反射的红外线强度进行测距,其基本原理为发光管发出红外光,光敏接收管接收前方物体反射光,据此判断前方是否有障碍物,同时根据发射光的强弱判断障碍物的距离,距离近则反射光强,距离远则反射光弱。
对于红外摄像技术感知行人和障碍物等潜在的动态安全隐患,具体工作方案如下:
在路侧每隔50m安装红外测距传感器,对恶劣天气导致道路能见度低的驾驶环境下,利用红外摄像技术对突发自然灾害如路面沉陷、路面坑洞和障碍物,或潜在的动态安全隐患如横穿道路的行人、横向路口突然出现的车辆和行人等进行检测,得到行驶车辆与障碍物的距离等数据后,通过数字传感器接口返回到主机平台,主机平台即可利用红外的返回信号来识别周围障碍物的情况。然后,通过无线连接及时将障碍物大小、距离等数据采用实例图像的方式在液晶显示器中实时显示,并根据行驶车辆与障碍物的距离,以颜色区分障碍物的危险等级。
主要装置包括:红外测距传感器、主机。
2.3 系统构建技术方案与应用
泛在感知安全行车系统主要由装设在行驶车辆上的77GHz毫米波雷达探测器和驾驶员视觉辅助装置,和架设在路侧的红外测距传感器以及相关的辅助设备构成。各项装置相互协调并联合应用,对台风、暴雨、大雾和道路结冰等恶劣天气道路能见度低的情况下潜在的行车风险进行检测和实时显示,相应的感知和检测技术方案如下:
(1)驾驶车辆与前方其它车辆之同的相对距离、相对速度、相对角度等驾驶环境数据信息由77GHz毫米波雷达探测器检测,驾驶车辆的行驶速度通过速度传感器检测。相关数据在仪表盘上的小型液晶显示器上采用实例图像的方式实时显示,根据行驶车辆与周围车辆的行车距离,以绿色、黄色和红色区分危险等级。
(2)在路侧每隔50m安装红外测距传感器,利用红外摄像技术对突发自然灾害如路面沉陷、路面坑洞和障碍物,或潜在的动态安全隐患如横穿道路的行人、横向路口突然出现的车辆和行人等进行检测。相关数据如障碍物大小、距离等在仪表盘上的小型液晶显示器上采用实例图像的方式实时显示,根据车辆与障碍物的距离,以绿色、黄色和红色区分危险等级。
(3)特别恶劣的气候条件如台风暴雨、大雾和夜间等能见度极低的驾驶环境下,该系统协调毫米波雷达探测器和红外摄像技术的优点,联合GPS、地形图、路线图等,最终形成3D建模并及时将相关数据传输到车辆上的小型液晶显示器。
本系统是基于现有物联网感知技术,结合蜂窝网络或专用短程通讯网络进行路况预警。在可视条件恶劣、视频监控难以发挥有效作用的情况下,为整个道路交通系统提供可靠而稳定的信息,主动、及时、快速、有效地将路况状况和潜在的行车安全隐患提供给驾驶人员,达到提前预知,及时规避潜在的行车风险。同时,红外技术的进一步应用,根据路面温度检测路面积水结冰情况,夏季高温路面爆胎指数预警,将有关信息即刻传输到视觉辅助装置显示或交通管理部门,提醒驾驶人员注意交通安全。
2.4 经济评价
泛在感知安全行车系统主要设备包括77GHz毫米波雷达探测器、速度传感器、红外测距传感器、主机处理器和显示装置,以及相关的辅助设备构成,其中红外测距传感器每隔50m在路侧架设,根据10km路线长度进行评估。
根据表1可知,在10km路段安装红外测距传感器,本文所开发的泛在感知安全行车系统设备安装和维护平均成本约12.4万元。系统安装在行驶车辆上或开发相应的手机APP软件,出售价格为0.3万元/套,出售40套设备即可收回成本,系统具有广阔的市场应用前景。另外,该系统能主动、及时、快速、有效地将路况状况和潜在的行车安全隐患提供给驾驶人员,达到提前预知,及时规避潜在的行车风险,大幅降低道路交通事故发生率,具有极大的技术经济效益和社会效益。
3 总结与展望
针对台风、暴雨、大雾和道路结冰等恶劣天气对道路行车安全的严重影响,本文基于现有物联网感知技术,结合蜂窝网络或专用短程通讯网络技术,开发一种毫米波雷达加红外摄像技术组成的泛在感知安全行车系统,对车辆行驶状况、突发自然灾害和潜在的动态安全隐患等进行精确感知和预警,主动、及时、快速、有效地将路况状况和潜在的行車安全隐患提供给驾驶人员,使驾驶人员及时发现潜在的安全隐患,及时对周围环境的变化做出快速判断并采取相应有效的应急预案和措施,提高车辆行驶的安全性,减少道路交通事故的发生。
本系统作为未来自动驾驶技术的探索和应用,通过后续的技术创新和发展,也可适用于未来常规小汽车、自动驾驶汽车等多种模式混行下的地面交通环境,具有较大理论意义和广阔的市场应用前景。
参考文献:
[1]道路交通运输安全发展报告(2017)[S].北京:国家安全监管总局和交通运输部,2017.
[2]骆云志,类雨能,王铃.基于毫米波雷达 CCD摄像机信息的D-S融合方法[J]. 数据采集与处理,2014,29(04):648-653.
[3]高振海,王俊,佟静等.车载毫米波雷达对前方目标的运动状态估计[J].吉林大学学报(工学版),2014,44(06):1537-1544.
[4]王亮.红外技术的对比分析与发展方向[J].中国公共安全(综合版),2012(10):106-108.
[5]吕南航.红外热成像仪在泉城监控中的作用[J].中国交通信息产业,2009(05):85-86.
作者简介:彭柔扬(1997-),女,广东梅州人,工科学士,研究方向:交通工程学。







