 学习和使用。
学习和使用。
3.2 程序设计
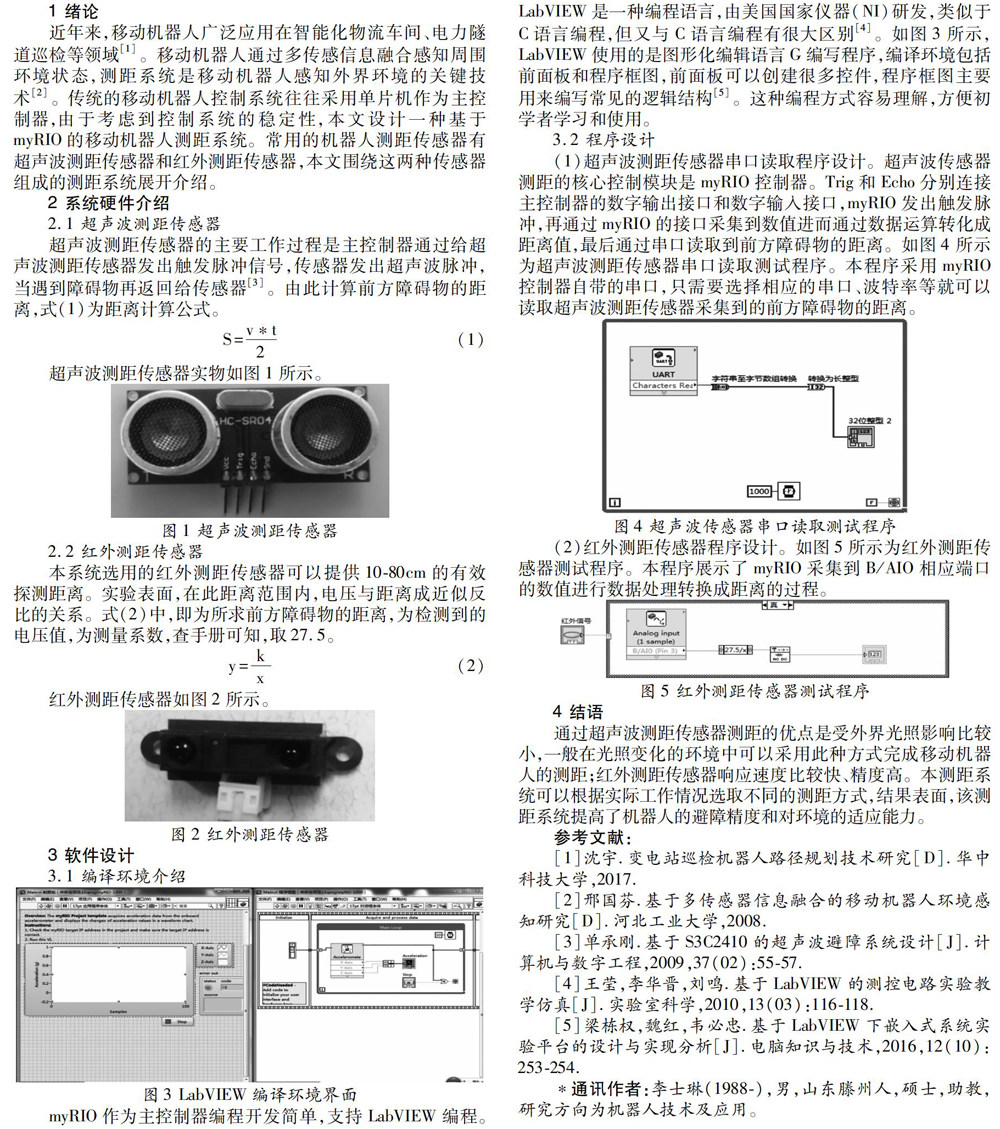
(1)超声波测距传感器串口读取程序设计。超声波传感器测距的核心控制模块是myRIO控制器。Trig和Echo分别连接主控制器的数字输出接口和数字输入接口,myRIO发出触发脉冲,再通过myRIO的接口采集到数值进而通过数据运算转化成距离值,最后通过串口读取到前方障碍物的距离。如图4所示为超声波测距传感器串口读取测试程序。本程序采用myRIO控制器自带的串口,只需要选择相应的串口、波特率等就可以读取超声波测距传感器采集到的前方障碍物的距离。
(2)红外測距传感器程序设计。如图5所示为红外测距传感器测试程序。本程序展示了myRIO采集到B/AIO相应端口的数值进行数据处理转换成距离的过程。
4 结语
通过超声波测距传感器测距的优点是受外界光照影响比较小,一般在光照变化的环境中可以采用此种方式完成移动机器人的测距;红外测距传感器响应速度比较快、精度高。本测距系统可以根据实际工作情况选取不同的测距方式,结果表面,该测距系统提高了机器人的避障精度和对环境的适应能力。
参考文献:
[1]沈宇.变电站巡检机器人路径规划技术研究[D].华中科技大学,2017.
[2]邢国芬.基于多传感器信息融合的移动机器人环境感知研究[D].河北工业大学,2008.
[3]单承刚.基于S3C2410的超声波避障系统设计[J].计算机与数字工程,2009,37(02):55-57.
[4]王莹,李华晋,刘鸣.基于LabVIEW的测控电路实验教学仿真[J].实验室科学,2010,13(03):116-118.
[5]梁栋权,魏红,韦必忠.基于LabVIEW下嵌入式系统实验平台的设计与实现分析[J].电脑知识与技术,2016,12(10):253-254.
通讯作者:李士琳(1988-),男,山东滕州人,硕士,助教,研究方向为机器人技术及应用。







